1. Назначение
корректирующих устройств. Укажите способы их
включения и особенности.
Основная задача
корректирующих устройств состоит в улучшении точности системы и качества
переходных процессов. Однако наряду с этим путем дополнительного введения в
систему корректирующих устройств решается более общая задача -
обеспечение устойчивости системы, если она была неустойчивой, а затем и
желаемого качества процесса управления.
Различают три вида основных корректирующих
устройств.
Последовательные
корректирующие устройства. Они
вводятся в цепь регулятора последовательно с другими звеньями. На рис.8.2
представлена структурная схема системы с последовательным корректирующим
устройством.
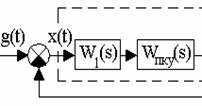
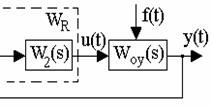
Рис. 8.2. Структурная схема системы
с последовательным корректирующим устройством
Здесь W1(s), W2(s) представляют собой передаточные функции заданных частей
регулятора, WПКУ(s) -
передаточная функция последовательного корректирующего звена, WОУ(s) - передаточная функция объекта управления.
Передаточная функция регулятора с
последовательным корректирующим устройством
WR1(s) = W1(s)
W2(s) WПКУ(s). (8.5)
Способ коррекции с помощью последовательного
корректирующего устройства не требует сложных расчетов и прост
в практическом исполнении. Поэтому он нашел широкое применение, особенно
при коррекции систем, в которых используется электрический сигнал в виде
напряжения постоянного тока, величина которого функционально связана с сигналом
рассогласования. Однако, последовательные
корректирующие устройства не ослабляют влияния изменений параметров элементом
системы на ее показатели качества. Поэтому последовательные корректирующие
устройства рекомендуется применять в системах, в которых элементы имеют
достаточно стабильные параметры.
Параллельные
корректирующие устройства. Они
вводятся в цепь регулятора параллельно с другими звеньями. На рис.8.3
представлена структурная схема системы с параллельным корректирующим устройством.
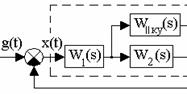
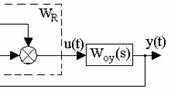
Рис.8.3. Структурная схема системы
с параллельным корректирующим устройством
Здесь W1(s), W2(s) представляют собой передаточные функции заданных частей
регулятора, WêêКУ(s) -
передаточная функция параллельного корректирующего звена, WОУ(s) - передаточная функция объекта управления.
Передаточная функция регулятора с
параллельным корректирующим устройством
WR2(s)=W1(s)[W2(s)+WêêКУ(s)]. (8.6)
Коррекция систем управления с помощью
параллельного корректирующего устройства эффективна, когда требуется
формировать сложные законы управления с введением производных и интегралов от
сигнала ошибки. Примером этому могут служить рассмотренные ранее типовые
регуляторы.
Обратные связи. Они вводятся в цепь регулятора и охватывают какие-либо
его звенья. Как отмечалось в разделе 3.3, обратные связи могут быть
положительными (ПОС) и отрицательными (ООС), кроме того
- жесткими и гибкими.
На рис.8.4 представлена структурная схема
системы с корректирующей обратной связью. Здесь W1(s),
W2(s) представляют собой передаточные функции
заданных частей регулятора, WОС(s)
- передаточная функция корректирующей обратной связи, WОУ(s)
- передаточная функция объекта управления.
Рис.8.4. Структурная схема системы с корректирующей обратной связью
Передаточная функция регулятора с
корректирующей обратной связью
 , (8.7)
, (8.7)
где знак “+” соответствует ООС, знак “-” - ПОС.
Коррекция местной обратной связью
используется в системах автоматического управления наиболее часто.
Корректирующая обратная связь образует в системе
внутренний контур помимо контура, образуемого главной обратной связью. В
подавляющем большинстве случаев используются отрицательные корректирующие
обратные связи, однако могут применяться также и положительные обратные связи,
например в комбинированных системах с компенсацией динамических ошибок.
Отрицательная корректирующая обратная связь
позволяет существенно ослаблять влияние изменения параметров элементов и их нелинейностей,
входящих в местный контур. Поэтому местной обратной связью желательно
охватывать те элементы корректируемой системы, которые в процессе работы могут
изменять свои параметры и имеют высокие значения коэффициентов передачи.